A Vision of Precision
Post Date: June 30, 2019 | Publish Date: Summer 2018

Legend has it, Daniel von Allmen took his seat at a 2012 luncheon at Ben Gurion University in Israel, and the guy next to him turned out to be a professor of electrical and computer engineering named Hugo Guterman.
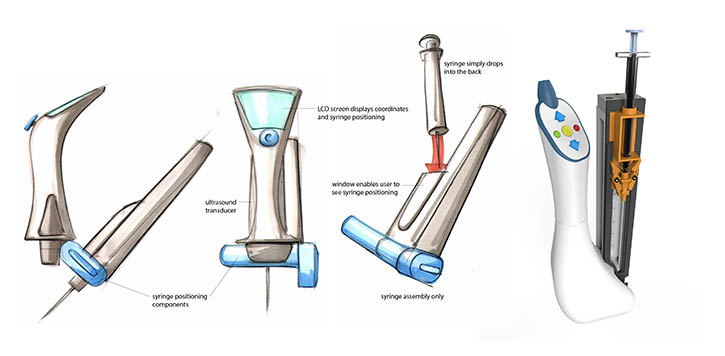
They chatted, and before plates were cleared, von Allmen had shown him some images on his laptop and explained his idea for a robotic needle delivery system guided by ultrasound imaging. He then sketched it out the best way available. On the back of a napkin.
Von Allmen, MD, Surgeon-in-Chief and the Lester W. Martin Chair of Pediatric Surgery at Cincinnati Children’s, lacked two important things that day: a consistent funding pipeline and anything remotely resembling an engineering degree.
He did not, however, lack vision that such a system could transform how children receive needle sticks, a potentially significant breakthrough given that a third of initial central placement attempts by care providers are unsuccessful. Children, after all, have far smaller veins than adults and are at times moving targets.
“Being seated there was pure happenstance,” von Allmen recalls. “Hugo was big in engineering expertise. This was very educational for me in terms of what it takes to bring a conception to reality.”
Fast forward a half-decade to last year’s launch of Xact Medical LLC, a new company that Cincinnati Children’s and Ben Gurion (BGU) co-founded to commercialize the Fast Intelligent Needle Delivery (FIND). Guterman, PhD, was a driving force on the technical side.
“It was,” von Allmen says modestly, leaning forward in his chair, “an incredibly big learning curve.” The best legends are always the true ones.
THE JOURNEY TO CLINICAL TRIAL, AND BEYOND
FIND uses ultrasound imaging to precisely, quickly, and conveniently place a needle tip at a point on the body that significantly improves the odds of successful vascular access. Then, robotics does the rest.
The device is now in pre-clinical development with a second prototype expected by this summer that will have different mechanics and be easier to sterilize. The hope after that is FDA approval.
In all, $1.5 million has been invested so far, including from Innovations Ventures, external grants, and CincyTech, which funds companies in life science and digital fields. Von Allmen serves as Chief Medical Adviser in Xact Medical, Guterman as Technical Adviser, and Andrew Cothrel, a veteran of medical technology development and commercialization, is CEO.
Even the device’s name had an evolution to it. Initially, it was called Image Guided Autonomous Needle Insertion Device, or IGANID. Then came Human Assisted Needle Delivery System, or HANDS. And finally, FIND.
One of the team’s challenges throughout FIND’s journey to clinical trial is an age-old one: investors simply view the financial ceiling for devices as lower, compared to pharmaceuticals and biologics. And for pediatric-centric devices, the market is even smaller.
For instance, when Innovation Ventures first began to market FIND’s technology, it drew interest from a range of potential investors, but their answers were the same: This is fantastic. Keep going a little further. Call us back.
THE POWER OF WISHFUL THINKING
“So we’re looking at making a patent finding that may never be valuable to the commercial world for, say, 10 years. No business does that,” explains Jon Brophy, a portfolio manager at Innovation Ventures who oversees its “devices” asset class. “Because of that, we take on a little more risk on decisions about intellectual property filings, and that costs money. Having a group like Innovation Ventures allows Cincinnati Children’s to take that kind of risk.”
Ultimately, the FIND technology could be expanded to include adult vascular access, aspirations, biopsies, injections and regional anesthesiology. Von Allmen, who also serves as Surgical Director of Cincinnati Children’s Neuroblastoma Program, points out that during chemotherapy, it sometimes takes a half hour to two and a half hours to place an IV.
“It sometimes takes a half hour to two and a half hours to place an IV.”
Sketching the basic design on a napkin took far less time. Guterman, the BGU engineer, was intrigued from the beginning.
“I thought that it was an interesting problem that I wasn’t aware existed,” he recalls. “He presented it as a special issue in children’s treatment. Only later, I discovered that the problem exists for adults as well. The real challenge was to take Dan’s description, which was just wishful thinking, and transform it into reality.”
That wishful thinking is a big part of FIND’s story, but the backstory of von Allmen’s idea is even more layered, reaching back more than a decade to the Research Triangle of North Carolina.
WANTED: MORE BABY STEPS, FEWER OBSTACLES
As Surgeon-in-Chief at North Carolina Children’s Hospital in the mid-2000s, von Allmen worked on the idea of needle guidance with a biomedical engineering group at Duke University and a team of aerospace engineers at North Carolina State University. They arrived at a proof-of-concept, building the robotic aspect on what they’d learned about the application of ultrasound.
In a paper published in November 2006 in IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, von Allmen and the engineers demonstrated the potential of the concept by using images acquired with a 3-D laparoscopic ultrasound device. Scanned coordinates directed a robotically controlled needle toward in vitro targets in a canine model.
The error rate for measurements using ultrasound guidance was 0.76 mm. In optical alignment—the longstanding eyeball test—it was 1.34 mm.
That success was a relative baby step. For one, von Allmen recalls, “We didn’t have patent lawyers.”
When he arrived at Cincinnati Children’s in 2009, one of his first stops was the Center for Technology Commercialization, now Innovation Ventures. The following year, von Allmen co-authored a second feasibility study, published in Ultrasound in Medicine and Biology, using of all things, turkey breast tissue.
Moving beyond simple thresholding algorithms, the team showed that the robot autonomously processed 3D ultrasound images to locate a metal rod embedded in tissue. The rod represented calcification. They then simulated a cyst by filling a void in the tissue with water.
‘IT WAS INCREDIBLY ACCURATE’
With no user input, the robot directed the needle to the desired target. Separate needle-touch experiments performed in a water tank yielded an error rate of 1.15 mm.
“By simulating simple procedures common in typical breast biopsies,” the authors wrote, “this study has demonstrated that autonomous guidance might eventually be extended to many relatively straightforward surgical tasks performed in large volume at hospitals and clinics.”
Three months after that study, the same team published a follow-up study in Ultrasonic Imaging that demonstrated the robot’s ability to deliver a needle stick in each of eight sectors in the phantom in a single session, with a success rate of 93 percent. A phantom is used to replicate the target area.
“What we found was, it was incredibly accurate,” von Allmen recalls. “But there’s a big difference between an idea versus a viable product. That’s where Innovation Ventures comes in. But I’m the one who takes care of the patient.”
On a recent morning, he and Cothrel met briefly at Cincinnati Children’s with the FIND device, discussing the second prototype that is now months away.
Then the two men went their separate ways: Cothrel to catch a flight to Washington, D.C., to make a presentation to potential investors; Von Allmen, still in scrubs, back to the O.R.
—By Tom O’Neill
(This article originally appeared in the Summer 2018 issue of Research Horizons.)
Devices on Track Toward Making a Difference